Leva de traslado, el perfil se corta en una cara de un bloque o una lámina de metal o de otro material, y la leva tiene un movimiento reciproco sobre una superficie como se muestra en la Fig. 7.1 
Esta es la forma básica, puesto que todas las levas se pueden considerar como cuñas que tienen superficies uniformes o, mas frecuentemente, con inclinación variables. La desventaja de este tipo, es que se obtiene el mismo movimiento en el orden inverso durante la carrera de retorno. Esto se puede evitar si envolvemos la cuña alrededor de la circunferencia de un circulo (fig. 7.2) para la forma de una leva de disco o plana. Cuando la acuña se forma en la superficie o punta de un cilindro, como se muestra en las Fig. 7.3, resulta una leva cilíndrica. 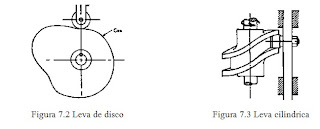
| De igual manera se tiene una leva cónica (Fig 7.4). | 
Tipos de varillas o seguidores. Debe tomarse en cuenta que la varilla o seguidor, puede hacerse mover en una línea recta o se puede pivotear para obtener un movimiento oscilatorio en cualquiera de los tipos de leva mencionados. Los diferentes tipos de varillas o seguidores se muestran en la figura7.5.

En el mecanismo ilustrado debemos notar que la forma de la leva es tal que no constriñe completamente el movimiento de la varilla, ya que no se ha indicado el medio de mantener contacto entre la leva y la varilla. El contacto continuo se efectúa usualmente por el empleo de las fuerzas de gravedad o la presión de un resorte. El mecanismo de la leva de movimiento positivo (Fig. 7.6) es aquel en el cual la varilla es obligada a moverse en una trayectoria definida por el constreñimiento de la superficie y sin la aplicación de fuerzas externas. Si no efectúa lo anterior se deberá únicamente a la rotura de alguna parte. 
Diseño del perfil. La forma del perfil de una leva está regida por los requerimientos relativos al movimiento de la varilla. Estos requerimientos dependen de la función que el mecanismo ejecuta en la máquina en la cual se va a aplicar. El ciclo de posiciones de la varilla, determinado por tales consideraciones, pueden o no necesitar ciertos periodos de “reposo” durante el cual la varilla no tiene movimiento, y ciertos periodos de movimiento de una naturaleza especifica. Generalmente resulta conveniente empezar con el problema del diseño de la leva haciendo primeramente una representación gráfica del movimiento de la varilla a la cual llamaremos diagrama de desplazamiento. Esta es una curva lineal, en la cual la abscisas representan el desplazamiento de la leva y la ordenadas representan el desplazamiento de la varilla. Como los dos miembros pueden tener movimiento lineal o angular, estos desplazamiento pueden tener movimiento lineal o angulares, dependiendo únicamente de la forma peculiar del mecanismo bajo consideración. El desplazamiento lineal de la varilla comúnmente se denomina la “alzada” aunque algunas veces el movimiento no es en una dirección vertical. Frecuentemente en aplicación prácticas, las varillas se mueven exacta o aproximadamente de acuerdo con una de las siguientes condiciones: a) Movimiento con velocidad constante b) Movimiento con aceleración o desaceleración constante c) Movimientos armónico simple d) Cicloidal Los correspondientes diagrama de
desplazamiento para estos cuatro casos,
junto con algunas modificaciones se
considerarán a continuación. La flecha de
excéntricos, donde la leva tiene movimiento
angular, se considerará que gira a una
velocidad constante. La discusión que sigue
esta basada en esta suposición. De esta manera
la curva de desplazamiento es una en la cual la
base representa tiempo, así como también
desplazamiento de la leva, ya que las dos
cantidades son proporcionales la una a la otra. Velocidad constante. En la Fig. 7.7 se muestra el diagrama de
desplazamiento para el mecanismo de una
leva, en el cual la varilla se eleva con velocidad
constante durante 90° regresa con velocidad
constante durante 90° y reposa durante el
resto del ciclo.
Cuando un cuerpo se mueve con velocidad constante se desplazamiento es un proporción directa al tiempo transcurrido. Si se supone una velocidad constante para la leva, el desplazamiento de la varilla es por consiguiente proporcional al desplazamiento de la leva. La cuerva AB debe ser, para los primeros 90°, una línea recta, Durante el segundo periodo de 90°, una línea recta horizontal BC representa el periodo de reposo. Durante el periodo de reposo los siguientes 90° del movimiento de la leva se indican por otra línea recta ya que aquí tenemos otra vez velocidad constante. Se traza DE horizontalmente para el periodo final. Para una aplicación práctica probablemente el diagrama se modificaría en la forma ilustrada por las líneas punteadas a menos que la leva girára muy despacio. Esto se efectúa para evitar cambios bruscos del movimiento cuando empieza y termina la alzada y se substituye por un cambio gradual de velocidad que elimina choque y ruido. Nos referimos nuevamente a este asunto más adelante. Aceleración constante.
Para cualquier cuerpo en movimiento con aceleración constante, s = ½ at2 donde s es el desplazamiento a es la aceleración, y t el intervalo de tiempo. La distancia desplazada es entonces proporcional al cuadrado del tiempo. Si tomamos intervalos del desplazamiento de la leva de 1, 2, 3, 4, etc. Unidades de tiempo, los desplazamientos de la varilla al final de estos intervalos serán proporcionales a las cantidades 12, 22, 32, etc., o sea 1, 4, 9, etc. Este principio se aplica en el diagrama de desplazamiento mostrado en la fig. 7.8. Aquí los requisitos son que la varilla se mueva una distancia AC durante el desplazamiento de la leva AB. La construcción es como sigue. El segmento AB se divide en cualquier número conveniente de espacios iguales; éstos en la figura son en número de 4. Cada uno de estos espacios representa un intervalo de tempo igual, bajo la suposición de que la leva tiene velocidad uniforme.
Los desplazamientos de la leva hasta los finales de estos intervalos son proporcionales a los números 1, 4, 9, 16. Pero AC es el desplazamiento al final del cuarto intervalo. Por tanto, dividimos AC en diez y seis partes iguales y proyectamos desde la primera, la cuarta, la novena, y la dieciseisava, como se ilustra en la figura, localizando de este modo los puntos sobre la curva requerida. Movimiento de aceleración y desaceleración constante. Si la aceleración persiste hasta el final del viaje dela varilla, se obtendría como resultado una velocidad máxima justo antes de que la varilla llegara el reposo, y esto causaría un choque, a menos que la velocidad e la leva fuera muy lenta. Consecuentemente el periodo de aceleración deberá durar solamente una parte del intervalo de alzada y seguirá por una “desaceleración” con lo cual se obtendrá que la varilla llegue gradualmente al reposo. Si damos a estas cantidades valores constantes, comúnmente resultara en una acción suave dela leva. La aceleración constante puede o no ser igual a la desaceleración consten; el perfil de la leva se puede diseñar para obtener cualquier relación deseada de aceleración desaceleración. El diagrama de desplazamiento para un caso como el descrito se considerará enseguida. Sea a1 la aceleración constante durante la
primera parte del movimiento de la verilla,
y s1 y t1 el desplazamiento y el tiempo.
Sea a2 la desaceleración durante la última
parte del movimiento. Siento s2 y t2 el
desplazamiento y el tiempo para el mismo
intervalo. La relación a1/a2 es la relación de
aceleración – desaceleración. Ahora S= s1+s2,
donde S es el movimiento total de la varilla.
Si v = velocidad al final del periodo de
aceleración, por la ecuación v2 = v0
2+2as v 2 = 2 a1s1 =2 a2s2 o sea a1 = s2 a2 s1 también, según la ecuación v = v0 + at;
para una velocidad inicial cero: v = a1 t1 = a2 t2 o sea a1 = t2 a2 t1 Estos es, los intervalos de desplazamiento
y tiempo son uno al otro inversamente
proporcional como la relación
aceleración-desaceleración.
Ejemplo. Trace el diagrama de
desplazamiento para el mecanismo
de una leva que tiene un movimiento
de dos pulgadas (5 cm) durante 180°
del desplazamiento de la leva; la aceleración
y desaceleración son constantes y tienen
una relación de 3 a 1
De la discusión anterior es evidente que los desplazamientos y los tiempos correspondientes a los dos intervalos son en una relación de 1 a 3. Para el periodo de aceleración, el desplazamiento es entonces una cuarta parte del desplazamiento total, y el periodo dura un cuarto del tiempo total, finalizando a 45° del desplazamiento de la leva (fig. 7.9). Esto fija la posición del punto B en la línea de 45° siendo la ordenada de ½ pulgada (1.27 cm) la construcción para los otros puntos en la curva de aceleración es igual a la empleada en la fig. 7.8 En la curva de desaceleración BC se localiza de la misma manera trazando desde C hacia la izquierda.
Modificación prácticas al diagrama de
velocidad constante.
Según lo anotado el diagrama de desplazamiento
para la leva de velocidad constante, se modifica
en cierto grado de la forma teórica para aplicación
prácticas, con el propósito de evitar cambios
bruscos de velocidad al principio y al final de los
periodos de la alzada.
Esta modificación se pude efectuar mejor
mediante el uso de un periodo corto de aceleración
constante al principio de la alzada, el cual dura
hasta que se ha obtenido un velocidad apropiada.
Entonces la leva se mueve con velocidad constante
hasta que se aproxima al final del periodo de
la alzada donde se aplica una desaceleración
constante, y la leva es llevada hasta el reposo sin
choque.
La construcción del diagrama de la alzada se
considerará ahora para un caso como el descrito.
Supóngase que se especifica una lazada para la
varilla durante 150° del movimiento de la leva y
los desplazamientos son 30° durante la aceleración
constante, 90° para la velocidad constante, y
30° para la restante desaceleración constante.
Cuando un cuerpo se acelera uniformemente desde
el reposo hasta la velocidad v, en t unidades
de tiempo es evidente que la velocidad promedio
para los periodos es v/2 y la distancia recorrida
es vt/2. Por otra parte, si el cuerpo tuviera una
velocidad constante v, se movería la misma
distancia vt/2 en el tiempo t/2.
Consecuentemente la verilla en cuestión se
movería la misma distancia durante los primeros
30° donde tienen aceleración constante, que
la que se mueve en intervalos subsecuentes
de 15° con velocidad constante. Por tanto, el total de la alzada se puede considerar compuesto de ocho incremento iguales, el primero se ejecuta en el periodo de los primeros 30° los siguientes seis en los subsiguientes intervalos de 15° y el último en el periodo final de 30°. Así pues, dividimos la alzada total (fig. 7.10) en ocho partes iguales, obteniendo los puntos 1, 2,3, etc., y las proyecciones de 1 hasta 1´, 2 hasta 2´, etc. Conectando 0,1´,2´,3´, por una curva uniforme se completa el diagrama. Los puntos intermedios para la curva de aceleración y desaceleración se pueden localizar como en la Fig. 7.8.
Movimiento armónico simple. La construcción del diagrama de desplazamiento para el movimiento armónico simple de la varilla es la misma que para el trazo de la curva Tiempo-desplazamiento para un punto con movimiento armónico. La fig. 7.11 ilustra un caso donde la varilla se eleva durante 180° del movimiento de la leva, reposa por 90° y cae a la posición inicial en 90°. Se traza un semicírculo como se indica, empleando la alzada como diámetro. El ángulo de la leva para el periodo de la alzada 180°, se divide en cualquier número conveniente de partes iguales; cada una de estas representa 30°; el semicírculo también se divide en el mismo número de arcos iguales y de esta manera se localizan los puntos 1, 2, 3, 4, etc.
Construcción del perfil de la leva. Método general.
Hasta ahora hemos discutidos el método
para dibujar diagrama de desplazamiento
para los movimientos requeridos para la
varilla. El siguiente paso que se considerará,
es encontrar los perfiles de la leva necesarios
para producir estos movimientos. La construcción
se altera en sus detalles con los diferentes tipos
de varillas, pero podemos esbozar un método
general que se puede aplicar para todos los casos,
sin consideración de la forma de la curva de
desplazamiento, o de la variedad de la varilla en
uso. Es aplicable para levas planas o de disco,
levas cilíndricas y levas de traslado y comprende
los siguientes pasos:
(A) la leva se considera como el eslabón fijo en
el mecanismo en vez de la bancada que soporta
la flecha de excéntricos y guié la varilla. Esto es,
tratamos con la inversión del mecanismo actual.
Como quedo anotado, el movimiento relativo de
cualquier parte de los eslabones queda sin alterarse
cuando el mecanismo se invierte, por esto, la leva
y la varilla tendrán el mismo movimiento relativo,
no importando si es la bancada o la leva la que se
considera como miembro fijo.
(B) La parte de la varilla que actúa sobre la leva,
se traza en las varias posiciones que ocupará en
diferentes instantes durante su movimientos cíclico
relativo a la leva estacionaria. La superficie de una
rodaja; un punzón, una cara plana, convexa o cóncava
en deslizamiento; etc. En la fig. 7.14 con las líneas
punteadas se ilustra la posición de la varilla
correspondiente a los desplazamientos angulares
de 30°, 60° y 90° etc., desde un radio
arbitrario cero. La elección de los intervalos
angulares depende del número de puntos
que se desean localizar en el perfil de la leva.
(C) El perfil de la leva se localiza dibujando una curva uniformemente tangente a las superficies de contacto de la varilla en sus diferentes posiciones. La superficie de contacto de la varilla se localiza
como se requiere en (B) encontrando primero la
posición de algún punto seleccionado sobre la varilla.
El punto elegido que podriamos llamar “punto de
referencia” debe de ser uno que fácilmente se
puede localizar de los datos obtenidos por la curva
de desplazamiento, y también uno a partir del
cual se trazan convenientemente la superficie de
trabajo de la varilla. Por ejemplo, cuando se usa una
rodaja, el centro de la rodaja es el mejor punto para
este propósito; cuando la varilla es un plato, el
punto donde el eje de la varilla intercepta la cara
de contacto es el mas satisfactorio.
Debe notarse que las construcciones descritas en
los siguientes artículos difieren únicamente un de
la otra por las variaciones en la forma de la varilla
empleada y en la manera en que el movimiento
queda restringido con referencia a la bancada y a
la leva.
Leva plana o disco. Varilla de punzón. En este mecanismo, la leva tiene contacto con la varilla sobre una línea representada por el punto A en la Fig. 7.14 en todas las posiciones. Este estilo de varilla es apropiado únicamente para efectuar servicios muy ligeros, porque la punta no se puede lubricar con efectividad: La presión en este punto y el desgaste posible será excesivo. Suponiendo que se conocen los datos necesarios para trazar por puntos, según los métodos descritos anteriormente, el diagrama de desplazamiento (Fig. 7.14a), procederemos a discutir el método para dibujar el perfil de la leva. El diámetro del círculo base se considera como 2 pulgadas (5cm) y la alzada una pulgada (2.54 cm) Las distancias x, y, z, etc., en la Fig. 7.14a representan los desplazamientos de la varilla después de 30°,60°,90° etc., del movimiento de la leva, desde luego se pueden emplear cualesquiera otros ángulos convenientes. Primero se traza el círculo base (Fig. 7.14) y se elige un radian de 0° como la línea de referencia que representa la posición inicial del eje de la varilla. En la posición inicial, indicada por las líneas sólidas, la varilla en forma de punzón toca el círculo base. De acuerdo con el plan general esbozado en el
método para construir el perfil, consideramos la
leva como el eslabón fijo y movemos la varilla
alrededor de ella. El punto A es el punto de “
referencia” más conveniente y localizamos
primero sus posiciones sucesivas.
Para encontrar la posición de A después de 30° de movimientos de la leva, marcamos la distancia x desde A hacia fuera sobre la trayectoria del movimiento de este punto; de esta forma el punto 1 queda determinado. Luego con centro en O y radio O1 giramos el arco 1-1´ en el sentido opuesto al movimiento de la leva, subtendiendo un ángulo de 30° en el punto O. Entonces 1´ será la nueva posición de A correspondiente a 30° de movimiento angular. Empleando y ,z, etc., como desplazamientos, encontramos los puntos 2´, 3´, etc., en la misma forma. Como la leva toca siempre la varilla en A, terminamos la construcción trazando una cuerva suave pasando por los puntos a 1´,2´,3´, etc.
No siempre se mueve el borde de la varilla en una trayectoria recta que pasa por el centro del eje de la leva: la Fig. 7.15 muestra el caso cuando la varilla esta descentrada; es decir A se mueve sobre un línea que pasa a un lado del centro de la leva. La descripción para obtener la construcción del perfil de la leva requerida en la Fig. 7.14 puede aplicarse sin cambios para la Fig. 7.15. 
Varilla con rodaja.
Comúnmente la varilla se guía para que se
mueva con movimiento coplanario o se pivotea
para que gira alrededor de un punto fijo.
El método general se puede aplicar para ambos
casos. El centro de la rodaja se emplea como
punto de referencia y se determina primero su
trayectoria y de esta se localiza en varias
posiciones la superficie de contacto de la varilla
o sea la circunferencia e la rodaja.
(A) varilla con rodaja con movimiento coplanario. Suponemos que el diagrama de desplazamiento,
Fig. 7.16 especifica las necesidades del movimiento.
Primero se traza el circulo base (Fig. 7.17) y se
localiza la rodaja en su posición inicial tocando este
círculo. Se traza la trayectoria del centro de la rodaja
AA’, después localizamos un radian de 0º, por
conveniencia paralelo a AA’ y se proyectan intervalos
angulares de 30° a partir de éste y con centro en O.
Conservando la leva estacionaria, localizamos entonces
la posición del centro de la rodaja A, después de 30°
de desplazamiento de la varilla.
El diagrama de desplazamientos indica un
desplazamiento x a 30°; esa distancia se traslada a
lo largo de AA´, obteniéndose el punto 1. Con centro
en 0 y con radio 0-1, se describe un arco 1-1´en
sentido opuesto del movimiento de la leva, y de tal
longitud que subtienda un ángulo de 30° en O.
El punto 1 se puede localizar más fácilmente haciendo
la cuerda 1-1’ igual a la cuerda LM o sea 1L igual
a 1’M.

Los puntos 1´,2´,3´,4´, etc., se localizan de la misma manera. Empleando estos puntos como centros y con el radio de la rodaja, se dibujan los perfiles correspondientes de la superficie de contacto de la varilla. El perfil requerido de la leva evidentemente es una cuerva trazada tangente a cada uno de estos círculos. Esta cuerva se dibuja lo más uniformemente posible. En la Fig. 7.17 la línea AA´ no pasa por el eje del excéntrico; por esto se dice que la varilla esta “descentrada”. Algunas veces se procura el traza descentrado para reducir el empujé lateral durante el periodo de la alzada. La fig. 6.18 ilustra una leva obtenida cuando la varilla esta centrada, es decir cuando AA’ pasa a través de 0. Los puntos 1´,2´,3´, caen respectivamente en los radianes de 30°, 60° y 90°.
(B) Varilla de rodaja pivoteada.
Aquí se considera que el movimiento angular
de la varilla queda detallado siendo su
desplazamiento total f°. Trazamos un diagrama
de desplazamiento para el movimiento angular
de la varilla el cual también nos servirá como el
diagrama de desplazamiento lineal, para el
movimiento del centro de la rodaja A, puesto que
estas dos cantidades están en proporción directa
una a la otra (s = fr). Esta consideración es la base
para la construcción que sigue. Suponemos que el
circulo base, el diámetro de la rodaja, el largo de la
varilla y la posición de pivoteo son datos conocidos.
En la figura 7.20 primero trazamos el mecanismo
con la rodaja tocando el circulo base. Un arco AA´
con centro en B y radio BA y de tal longitud que
subtienda el ángulo f° en B, es la trayectoria del
movimiento del centro de la rodaja.
Luego trazamos el diagrama de desplazamiento,
Fig. 7.19, empleando la distancia AA´ rectificada
para representar el ángulo f. El método para
efectuar esto es exactamente el mismo que
el usando cuando los desplazamientos de la
varilla son lineales o angulares. Desde este punto
en adelante, la construcción es idéntica a la
empleada par la Fig. 7.17. La distancia x
representa el desplazamiento a 30° y se transporta
a lo largo de AA´ obteniéndose el punto 1. Con
centro O y con radio 01 se construye un arco y
se traza una cuerda 1-1´ en él, con una longitud
igual a la cuerda LM (o sea 1L=1´M). Los
puntos 2´,3´, etc., se localizan de la misma manera.
Se trazan los círculos que representan la rodaja
con 1´,2´,3´, como centros y finalmente se forma el
perfil de la leva de modo que toque todos estos
círculos.

Ángulo de presión de la leva.
Mientras que la leva gira y acciona su varilla,
ejerce una fuerza sobre la varilla a través del punto
de contacto y norma a la superficie de la leva, como
se muestra en la Fig. 7.26. Esta fuerza se descompone
en dos componentes, una normal al movimiento de la
varilla y la otra en dirección al movimiento de ésta.

La componente perpendicular al movimiento
Fn obviamente no es aconsejable, en vista de
que no solamente no efectúa un trabajo satisfactorio,
sino también tiende a separarse o brincarse del
vástago de la varilla y causa un desgaste excesivo
en las guías y soportes de la misma.
Podemos encontrar una medida de la magnitud
relativa de la componente no deseada mediante el
ángulo de presión de la leva a.
El ángulo de presión tienen un lado en dirección al
movimiento de la leva y el otro normal a la superficie
de la leva en el punto de contacto, como se ilustra
en la Fig. 7.26.
El valor máximo del ángulo debe ser lo menor posible,
y en general no debe exceder los 30°. La magnitud
de la componente no deseable es una función no
solamente del ángulo de presión, sino también
de la fuerza total implicada. Esto a su vez,
depende de la velocidad de la leva, el coeficiente
de fricción, el radio de la leva, la carga o resistencia
del resorte en la varilla, etc. En vista de estos
factores, no es posible calcular un valor máximo
absoluto par el ángulo de presión máxima para
todas las condiciones.
El ángulo de presión es una función del radio
del círculo base más el radio de la rodaja de la
varilla, del descentramiento, de la alzada de la
varilla, del ángulo girado por la leva mientras
ocurre la alzada y del tipo de movimiento
empleado para la varilla.
Diámetro del círculo base.
Al suponer cualquier diámetro del círculo base,
es muy importante tomar en cuanta ciertos
factores. Para una determinada alzada s durante
un desplazamiento angular especifico de la leva,
resultará un círculo base grande en un ángulo de
presión a pequeño. Esto se ilustra en la Fig. 7.27
donde la alzada s se requiere para el ángulo de la
leva . SE emplea una varilla de punzón; y por
simplicidad, se supone que la forma del perfil de
la leva durante el movimiento es una línea reta.
En la parte a) de la figura, la el diámetro del
círculo base es dos veces más grande que en la
parte b), permaneciendo todos los otros actores
constantes. El ángulo de presión en la parte
a) es considerablemente menos que en la parte
b), para las posiciones correspondientes de la leva de
punzón.
Si el diámetro del círculo base es muy pequeño
resultaría una condición en la que sería
imposible que toque toda las posiciones de la varilla.
Entonces para la varilla de cara plana mostrada en
la Fig. 7.22 con un círculo base pequeño resultaría
la situación mostrada en la Fig. 7.28 donde es
imposible dibujar una curva que toque todas las
líneas tales como 1-1´, 2-2´,3-3´etc.

La causa se debe a la muy rápida aceleración
o desaceleración de la varilla, y el remedio
esta en aumentar el diámetro del circulo base.
Cuando se agranda el círculo base, una cierta
cantidad, tres de las líneas coincidirán en un
punto; entonces el perfil presentara un filo,
el cual es posible que se desgaste muy
rápidamente. Si continuamos aumentando
el círculo base se ocasionara que desaparezca
este filo. En general el diámetro del círculo
base debe hacerse lo más grande posible
dentro de las limitaciones del espacio
disponible. También debe ser mayor en
diámetro que el cubo de la leva o la flecha
de la leva para asegurarse que la varilla no
va a trabajar en el cubo de la leva o la flecha
en vez de un el perfil de la leva.
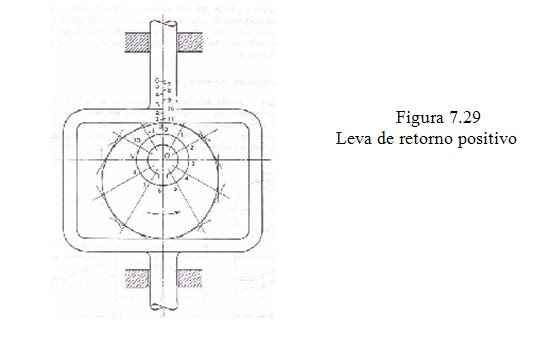
Cuando se tiene una leva de disco y seguidor radial,
con frecuencia es necesario regresar el seguidor
en forma positiva en vez de por medio de la
gravedad o por medio de un resorte. La
figura 7.29 muestra una leva de este tipo en
que la leva controla positivamente el movimiento
del seguidor, no solo durante el movimiento hacia
fuera sino también en la carrera de retorno.
Necesariamente, el movimiento de retorno debe
ser igual que el de salida, pero en direcciones
opuesta. A esta leva también se le conoce como
leva de anchura constante.

Para las levas planas o de disco el control del
movimiento de la varilla mediante el uso de dos
superficies de contacto se efectúa de las siguientes
maneras:
(A) por el uso de un disco ranurado y una varilla
con rodaja, como en la –Fig.7.6
(B) proporcionando dos superficies de contacto en
la varilla localizadas en lados opuestos del eje de
la leva, ambas trabajando en la misma leva
(vea. Fig. 7.29)
(C) Empleando dos superficies de contacto en
la varilla como en el tipo b, pero logrando que
cada una trabaje sobre una leva por separado
(véase Fig.7.30).

Levas tipo cilíndrica.
Tipos.
Estas levas pueden tener varillas guiadas en tal
forma que se muevan a lo largo de una línea recta
sobre un elemento del cilindro (Fig. 7.31a) o las
varillas pivoteadas de tal forma para que se
muevan alrededor de un eje perpendicular al eje de
la leva (Fig. 7.31b). La rodaja si es cilíndrica,
no puede tener contacto puro en rodadura debido
a las diferencias de las velocidades consecuentemente
se fabrican algunas veces en la forma de un cono
truncado (fig. 7.31c) con el ápice sobre el eje de
revolución de la leva. No obstante que esto promueve
una rotación de rodadura pura, también introduce
un empuje indeseable y que tiende a sacar la rodaja
fuera de la leva.

Levas de arco circular.
Generalidades.
Muchas levas tienen perfiles formados por
arcos circulares. Hay tres razones para emplear
estos tipos de perfiles con preferencia a otras
curvas: (1) las especificaciones del departamento de
dibujo son mas fáciles de hacer para el uso del
taller; (2) el proceso de manufactura es mas
económico; (3) la leva terminada se puede rectificar
con mayor facilidad y mayor presesión. Las
levas de las válvulas empleadas en los automóviles
y en otros motores de combustión interna, así
como muchas otras, con comúnmente de esta clase.
Eligiendo los radios y los centros e los arcos apropiadamente los requerimientos teóricos de los movimientos de las varillas pueden aproximarse muy exactamente. El proceso del diseño se puede efectuar primeramente dibujando el diagrama de desplazamiento para un movimiento deseado tomando una escala grande y trazar la leva a partir de este. Entonces por experimentación se eligen los arcos y los radios que se aproximen a la forma real. Finalmente la leva resultante se rectifica trazando hacia otras hasta el diagrama de desplazamiento el cual se compara con el original. Si en la revisión de la leva se encuentra una alteración de la curva de desplazamiento a una forma poco satisfactoria, será necesaria efectuar otra revisión. Para las levas de alta velocidad es necesario dibujar una curva de aceleración de la varilla, ya que la presión del resorte necesario en el tipo negativo depende en gran parte del peso de la varilla y de las partes adjuntas y de la aceleración. Comenzando con el diagrama de desplazamiento y tratándolo como una curva de tiempo-desplazamiento, según el método anotado, podemos construir una curva de velocidad-tiempo y una de aceleración-tiempo; esta última nos da la información necesaria para calcular el resorte.
Levas de las válvulas del motor de automóvil. La fig. 7.32 muestra un ensamble típico de válvula y leva para una Leva de automóvil con la nomenclatura de sus varias piezas.
Varillas primarias y secundarias.
El mecanismo de la Fig. 7.32 tiene una varilla
pivoteada, sobre el otro lado se encuentra una
varilla secundaria que hace contacto con movimiento
rectilíneo. Nos referimos a éstas respectivamente,
como leva “primaria” y “secundaria”. Las ventajas
de un arreglo como éste son:
(A) la leva secundaria se releva de casi todo el
empuje lateral; (B) con una determinada leva se
obtiene una gran relación de aumento de reducción del
desplazamiento primario, y (C) el eje de la leva secundaria
se puede descentrar a una distancia considerable del
eje del excéntrico para el acomodo del mecanismo de
una determinada máquina.
Se puede suponer que el movimiento de la leva
secundaria es definidamente específico, para que
pueda dibujarse un diagrama de desplazamiento
(como el de la Fig. 7.31) también podemos suponer
que se dan suficientes datos para permitir que el
mecanismo se trace en la posición indicada por las
líneas sólidas de la Fig.7.32 con la rodaja haciendo
contacto en el círculo base.
*PUBLICADO POR MELVIN ALVAREZ* |